- 홈으로
- RESEARCH
- Research Project
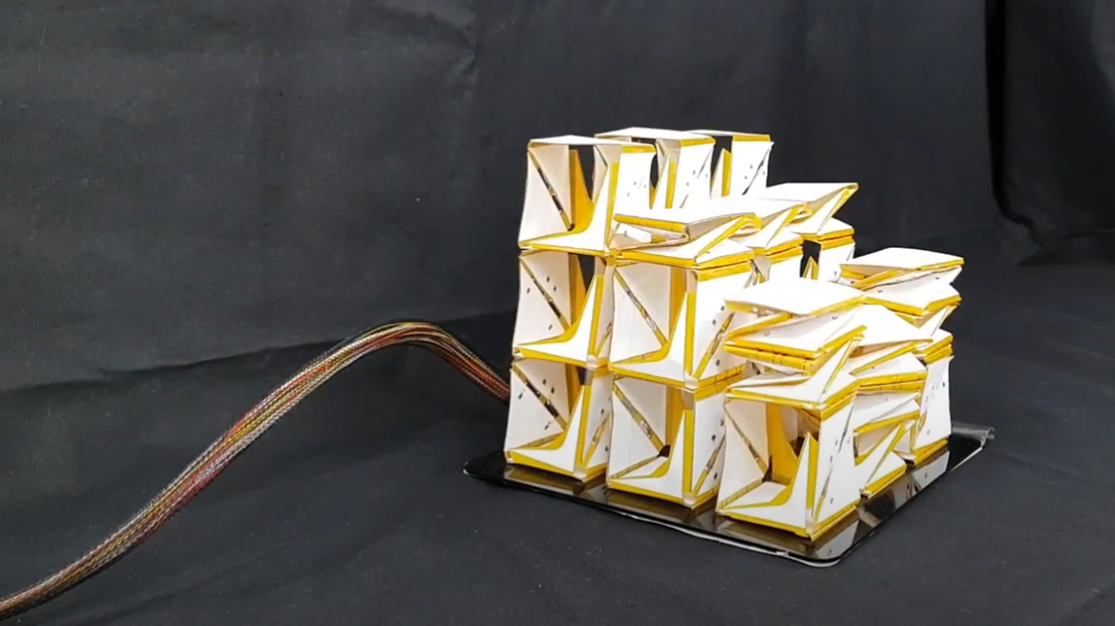
[IEEE TRO] (SNU BRL) Morphing Origami Block for Lightweight Reconfigurable System
Field
Kinetic ArchitectureType
Journal PublicationStatus
(Finished)Year
2021Participants
Dae-Young LeeJournal
IEEE Transactions on Robotics
Details
The study introduces a 3-D shape-shifting system using a morphing origami block to overcome limitations in reconfigurable systems, improving reversibility and stability. This innovative system enables rapid transformation with high degrees of freedom and allows the reconfiguration into diverse 3-D shapes, demonstrating promising practical applications.
S.-R. Kim, D.-Y. Lee, S.-J. Ahn, J.-S. Koh, K.-J. Cho, “Morphing Origami Block for a Lightweight Reconfigurable System,” IEEE Transactions on Robotics, vol. 37, no. 2, 2021.
More Information
Related Research Projects :
Related Journal Papers :
Related Patents :